




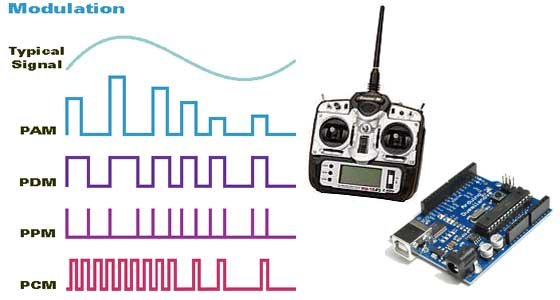
Llega el fin de semana y nuestras mentes inquietas piden trabajo. Por ese motivo, os dejo por aqui un interesante código para Arduino que permite leer pulsos PPM (y no PWM, que no es lo mismo) o dicho sin siglas, modulación por posición de pulso. Ésta técnica se utiliza muchísimo en radio control, más concretamente en las emisoras digitales las cuales utilizan dicho protocolo para comunicarse con el receptor e incluso para telemetría. Ésto nos permite leer los datos de un receptor de una emisora Futaba o Graupner por ejemplo y así poder controlar nuestros proyectos con una emisora digital. Ésto está muy bien por ejemplo para robótica, ya que podemos ahorrarnos hacer, a parte del robot en sí, el mando corresponiente para controlarlo.
Lector PPM básico para Arduino
#define channumber 6 //Cuantos canales tiene tu radio???????/How many channels have your radio???
int channel[channumber]; //Valores de canales leidos/ readed Channel values
int PPMin = 4;
void setup()
{
Serial.begin(9600); //Iniciamos com serial/
pinMode(PPMin, INPUT); //Patita 4 como entrada / Pin 4 as input
}
void loop()
{
//Espera hasta que la senal de sincronizacion llegue, debe ser > 4 milisegundos
//waits ultil synchronize arrives > 4 miliseconds
if(pulseIn(PPMin , HIGH) > 4000); //Si el pulso del pin 4 es > que 4 msegundos continua /If pulse > 4 miliseconds, continues
{
for(int i = 1; i <= channumber; i++) //lee los pulsos de los demas canales / Read the pulses of the remainig channels
{
channel[i-1]=pulseIn(PPMin, HIGH);
}
for(int i = 1; i <= channumber; i++) //Imprime los valores de todos los canales / Prints all the values readed
{
Serial.print("CH"); //Canal/Channel
Serial.print(i); // Numero del canal / Channel number
Serial.print(": "); // que te importa
Serial.println(channel[i-1]); // Imprime el valor/ Print the value
}
delay(200);//Le da tiempo para imprimir los valores en el puerto/ Give time to print values.
}
}
Lector PPM para Arduino mejorado con filtro antisalto (anti-glitch)
#define channumber 6 //Cuantos canales tiene tu radio???????/How many channels have your radio???
#define filter 10 // Filtro anti salto/ Glitch Filter
int channel[channumber]; //Valores de canales leidos/ readed Channel values
int lastReadChannel[channumber]; //Ultima lectura obtenida/ Last values readed
int conta=0; //Contador/couter
void setup()
{
Serial.begin(9600); //Iniciamos com serial/ Serial Begin
pinMode(4, INPUT); //Patita 4 como entrada / Pin 4 as input
pinMode(13, OUTPUT); // Led pin 13
}
void loop()
{
if(pulseIn(4, HIGH) > 3000) //Si el pulso del pin 4 es > 3000 usegundos continua /If pulse > 3000 useconds, continues
{
for(int i = 0; i <= channumber-1; i++) //lee los pulsos de los canales / Read the pulses of the channels
{
channel[i]=pulseIn(4, HIGH);
}
for(int i = 0; i <= channumber-1; i++) //Promedia los pulsos/Average the pulses
{
if((channel[i] > 2000) || (channel[i] <100))//Si se pasa del rango envia ultimo pulso/ If channel > max range, chage the value to the last pulse
{
channel[i]= lastReadChannel[i];
}
else
{
channel[i]=(lastReadChannel[i]+channel[i])/2; //Promedio el pulso pasado con el nuevo pulso/Average the last pulse eith the current pulse
conta++; //Incrementa el contador/ increment counter
}
}
}
if(conta > filter)//Si el contador es mayor al filtro imprime valores/ If counter is > than filter, then prints values
{
for(int i = 0; i <= channumber-1; i++) //Ciclo para imprimir valores/Cycle to print values
{
Serial.print("CH"); //Canal/Channel
Serial.print(i+1); // Numero del canal / Channel number
Serial.print(": "); // que te importa
Serial.println(channel[i]);
lastReadChannel[i]=channel[i];
}
if(channel[4] > 1000) //si el canal 5 tiene un rango mayor a 500 enciende el LED/ If channel 5 is > than 500 turn on the led
{
digitalWrite(13, HIGH);
}
else
{
digitalWrite(13, LOW);//Si no lo apaga/If not turn it off
}
delay(400); //Delay
conta=0;//Reinicia el contador/ Restart couter.
}
}
Creo que éstos pequeños códigos hablan por sí solos y son relativamente sencillos de entender.